Formamos profesionales para asegurar su futuro

INTRODUCCIÓN A LA ROBOTICA
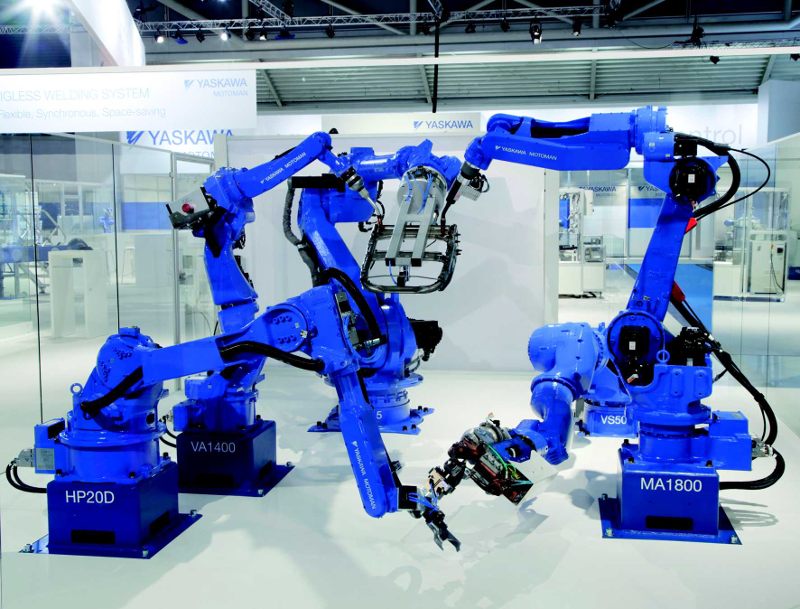
Este curso cubre las bases para la modelación de los manipuladores robóticos considerando la cinemática, la dinámica, los métodos para obtener trayectorias y planeación de movimientos así como el uso de control con lazo abierto y cerrado aplicado, así como el modelado.
El objetivo fundamental del curso es lograr que el estudiante aplique las bases de modelación cinemática, dinámica y de control mediante algoritmos matemáticos utilizando paquetes como el MATLAB en un entorno de análisis y aplicación.
Destinatarios
Objetivos
Temario
Diploma acreditativo
Metodología
envíanos un eMail
Modalidades
- Presencial
- Semipresencial
- A distancia
- Online
Cursos similares
Últimas convocatorias
-
 29/04/2024CURSO OFICIAL DE FORMACION AL PERSONAL OPERADOR DE APARATOS DE BRONCEADO ARTIFICIAL MEDIANTE RADIACCIONES ULTRAVIOLETAS en BERTAMIRANS
29/04/2024CURSO OFICIAL DE FORMACION AL PERSONAL OPERADOR DE APARATOS DE BRONCEADO ARTIFICIAL MEDIANTE RADIACCIONES ULTRAVIOLETAS en BERTAMIRANS -
 12/03/2024CURSO OFICIAL HIGIENICO-SANITARIO DE APLICADOR DE TATUAJES, MICROPIGMENTACION Y PIERCING en BERTAMIRANS
12/03/2024CURSO OFICIAL HIGIENICO-SANITARIO DE APLICADOR DE TATUAJES, MICROPIGMENTACION Y PIERCING en BERTAMIRANS -
 06/02/2024CURSO APLICADOR MANIPULADOR DE PRODUCTOS FITOSANITARIOS (NIVEL CUALIFICADO) en BERTAMIRANS - AMES
06/02/2024CURSO APLICADOR MANIPULADOR DE PRODUCTOS FITOSANITARIOS (NIVEL CUALIFICADO) en BERTAMIRANS - AMES -
05/02/2024CURSO OFICIAL HIGIENICO-SANITARIO DE APLICADOR DE TATUAJES, MICROPIGMENTACION Y PIERCING en BERTAMIRANS -AMES
-
 24/11/2023CURSO RENOVACION APLICADOR PRODUCTOS FITOSANITARIOS NIVEL CUALIFICADO en BERTAMIRANS - AMES
24/11/2023CURSO RENOVACION APLICADOR PRODUCTOS FITOSANITARIOS NIVEL CUALIFICADO en BERTAMIRANS - AMES -
 15/11/2023Curso Oficial Higienico-sanitario de Renovación de Aplicador de Tatuajes, Micropigmentación y Piercing en Bertamirans - Ames
15/11/2023Curso Oficial Higienico-sanitario de Renovación de Aplicador de Tatuajes, Micropigmentación y Piercing en Bertamirans - Ames -
 19/06/2023CURSO APLICADOR BIOCIDAS NIVEL ESPECIAL: TRATAMIENTO CON PRODUCTOS MUY TÓXICOS Y CARCINÓGENOS, MUTÁGENOS, TOXICOS PARA LA REPRODUCCIÓN (CMRs). en BERTAMIRANS - AMES
19/06/2023CURSO APLICADOR BIOCIDAS NIVEL ESPECIAL: TRATAMIENTO CON PRODUCTOS MUY TÓXICOS Y CARCINÓGENOS, MUTÁGENOS, TOXICOS PARA LA REPRODUCCIÓN (CMRs). en BERTAMIRANS - AMES -
29/05/2023CURSO RENOVACION DE CUALIFICADO DE APLICADOR / MANIPULADOR DE PRODUCTOS FITOSANITARIOS en BERTAMIRANS - AMES
SANEA es una entidad homologada, acreditada y certificada para impartir formación oficial
